前言:最近没事儿没工作,计划每天写一篇博客,防止对Unity生疏,也可以记录学习的点点滴滴。
A*寻路在很多面试里都会问到,但实际工作中根本用不着自己写,网上有成熟的插件,不容易错还方便。
思路:我们将地块切成大小均匀的格子,格子分成普通(可通行)、起点、终点、阻挡类型(不可通行)。每次循环时,查找open列表中综合代价最低的为当前格子,查找当前格子的八个方向(也可以查找四个方向)的邻格,计算综合代价并加入到open列表中去,当前格子就加入到close列表里,并从open列表中移除。当open列表内容为空时,或者当前格子已经为结束点时,结束循环。F代表综合代价,也就是起始距离 + 结束距离 = 综合距离;H代表结束距离(忽视阻挡);G代表起始距离
示例:
第一步,先实现Cell对象

using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System;
public class Cell : MonoBehaviour, IComparable
{
private CellType m_type;
public CellType myType
{
get => m_type;
set
{
m_type = value;
switch (m_type)
{
case CellType.Normal:
SetColor(Color.white);
break;
case CellType.Start:
SetColor(Color.green);
break;
case CellType.End:
SetColor(Color.red);
break;
case CellType.Block:
SetColor(Color.black);
break;
}
}
}
public Vector2Int pos;//坐标
public int F, G, H;//综合代价、起始代价、结束代价
public Cell parent;//父物体,为方便查找上一个节点,类似链表
private MeshRenderer render;
private void Awake()
{
render = GetComponent<MeshRenderer>();
}
public void SetColor(Color color)
{
render.material.color = color;
}
/// <summary>
/// 两个cell对象排序,需要实现icompareable接口,指定它俩对比,是指对比F
/// </summary>
/// <param name="obj"></param>
/// <returns></returns>
public int CompareTo(object obj)
{
Cell cell = (Cell)obj;
if (cell.F > F)
{
return -1;
}
else if (cell.F == F)
{
return 0;
}
else
{
return 1;
}
}
}
第二步,实现查找具体方法
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
/// <summary>
/// 这就是格子类型
/// </summary>
public enum CellType
{
Normal = 1,
Start = 2,
End = 3,
Block = 4
}
public class AStar : MonoBehaviour
{
/// <summary>
/// 这是生成地图数据
/// </summary>
public int[,] map =
{
{2, 1, 4, 1, 1 },
{1, 1, 4, 1, 1 },
{1, 1, 4, 1, 1 },
{1, 1, 4, 1, 1 },
{1, 1, 1, 1, 3 }
};
/// <summary>
/// 预制体
/// </summary>
public GameObject prefab;
/// <summary>
/// 所有格子对象
/// </summary>
private Cell[,] cells;
/// <summary>
/// 开始点坐标和结束点坐标
/// </summary>
private Vector2Int startPos, endPos;
/// <summary>
/// open列表和close列表
/// </summary>
private List<Cell> openList, closeList;
/// <summary>
/// 存储路径的栈
/// </summary>
private Stack<Cell> path;
private void Start()
{
cells = new Cell[map.GetLength(0), map.GetLength(1)];
openList = new List<Cell>();
closeList = new List<Cell>();
path = new Stack<Cell>();
//生成地图
Vector3 pos = Vector3.zero;
for (int i = 0; i < map.GetLength(0); i++)
{
for (int j = 0; j < map.GetLength(1); j++)
{
pos.Set(i * 1.5f, 0, j * 1.5f);
GameObject obj = GameObject.Instantiate<GameObject>(prefab);
obj.transform.parent = transform;
obj.transform.position = pos;
Cell cell = obj.AddComponent<Cell>();
CellType temp = (CellType)map[i, j];
if (temp == CellType.Start)
{
startPos.Set(i, j);
}
else if (temp == CellType.End)
{
endPos.Set(i, j);
}
cell.myType = temp;
cell.pos.Set(i, j);
cells[i, j] = cell;
}
}
}
private void Update()
{
if (Input.GetMouseButton(0))
{
Find();
StartCoroutine(Draw());
}
}
private void Find()
{
openList.Add(cells[startPos.x, startPos.y]);
Cell currentCell = openList[0];
while (openList.Count > 0 && currentCell.myType != CellType.End)
{
//通过排序找到综合代价最小的
openList.Sort();
currentCell = openList[0];
//这里已经找到了
if (currentCell.myType == CellType.End)
{
while (currentCell.parent != null)
{
if (currentCell.parent.myType != CellType.Start)
{
path.Push(currentCell.parent);
}
currentCell = currentCell.parent;
}
return;
}
//查找八个邻格
for (int i = -1; i <= 1; i++)
{
for (int j = -1; j <= 1; j++)
{
//增量为0,代表这个坐标指自己,所以直接跳过
if (i == 0 && j == 0)
{
continue;
}
//如果想只获取四个方向的邻格,就需要排除增量i = 增量j的情况
//if (i == j)
//{
// continue;
//}
int x = currentCell.pos.x + i;
int y = currentCell.pos.y + j;
if (x < 0 || y < 0 || x >= cells.GetLength(0) || y >= cells.GetLength(1) || cells[x,y].myType == CellType.Block || closeList.Contains(cells[x,y]))
{
//这里判断当前邻格的坐标是否合法?是否为阻塞格子?是否已经存在于close列表中?
continue;
}
//重新计算起始距离,乘10为了方便计算。当前坐标的格子的起始距离 = CurrenCell的起始距离 + 当前坐标的格子与CurrenCell的距离
int g = (int)(currentCell.G + Mathf.Sqrt(Mathf.Abs(i) + Mathf.Abs(j))* 10);
if (cells[x,y].G == 0 || g < cells[x,y].G)
{
//若当前坐标的格子并未被查找过,或者当前坐标的格子的起始代价大于新算的起始代价,则更新
cells[x, y].G = g;
cells[x, y].parent = currentCell;
}
cells[x, y].H = (Mathf.Abs(x - endPos.x) + Mathf.Abs(y - endPos.y)) * 10;//计算结束距离
cells[x, y].F = cells[x, y].G + cells[x, y].H;//综合代价
if (!openList.Contains(cells[x,y]))
{
openList.Add(cells[x, y]);
}
}
}
openList.Remove(currentCell);
closeList.Add(currentCell);
if (openList.Count == 0)
{
//这里是指open列表都已经没有内容了,但是仍未查找到结束点,因此可认为无路可达
Debug.LogWarning("穷途末路");
}
}
}
private IEnumerator Draw()
{
while (path.Count > 0)
{
Cell cell = path.Pop();
cell.SetColor(Color.blue);
yield return new WaitForSeconds(0.2f);
}
}
}
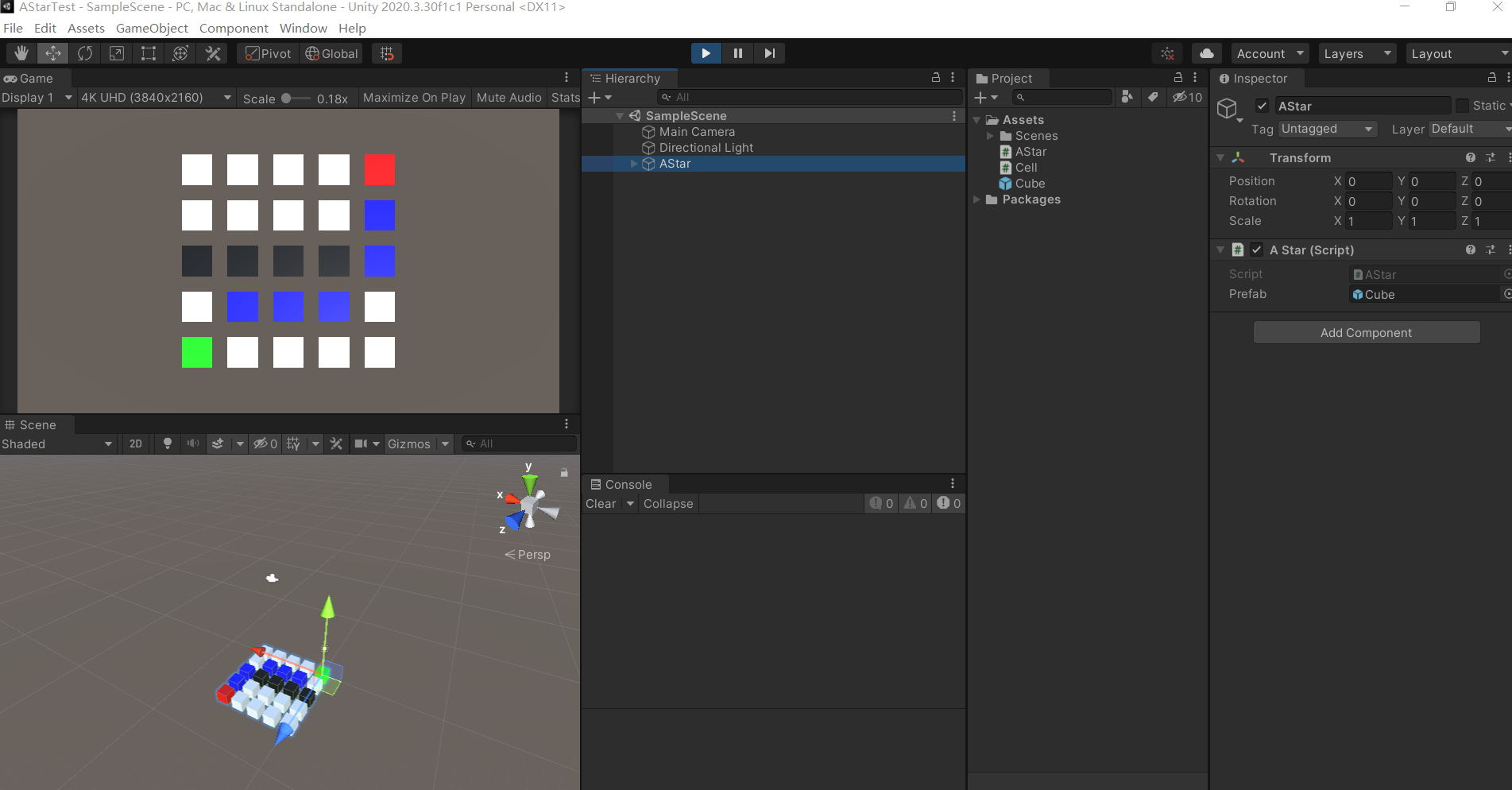
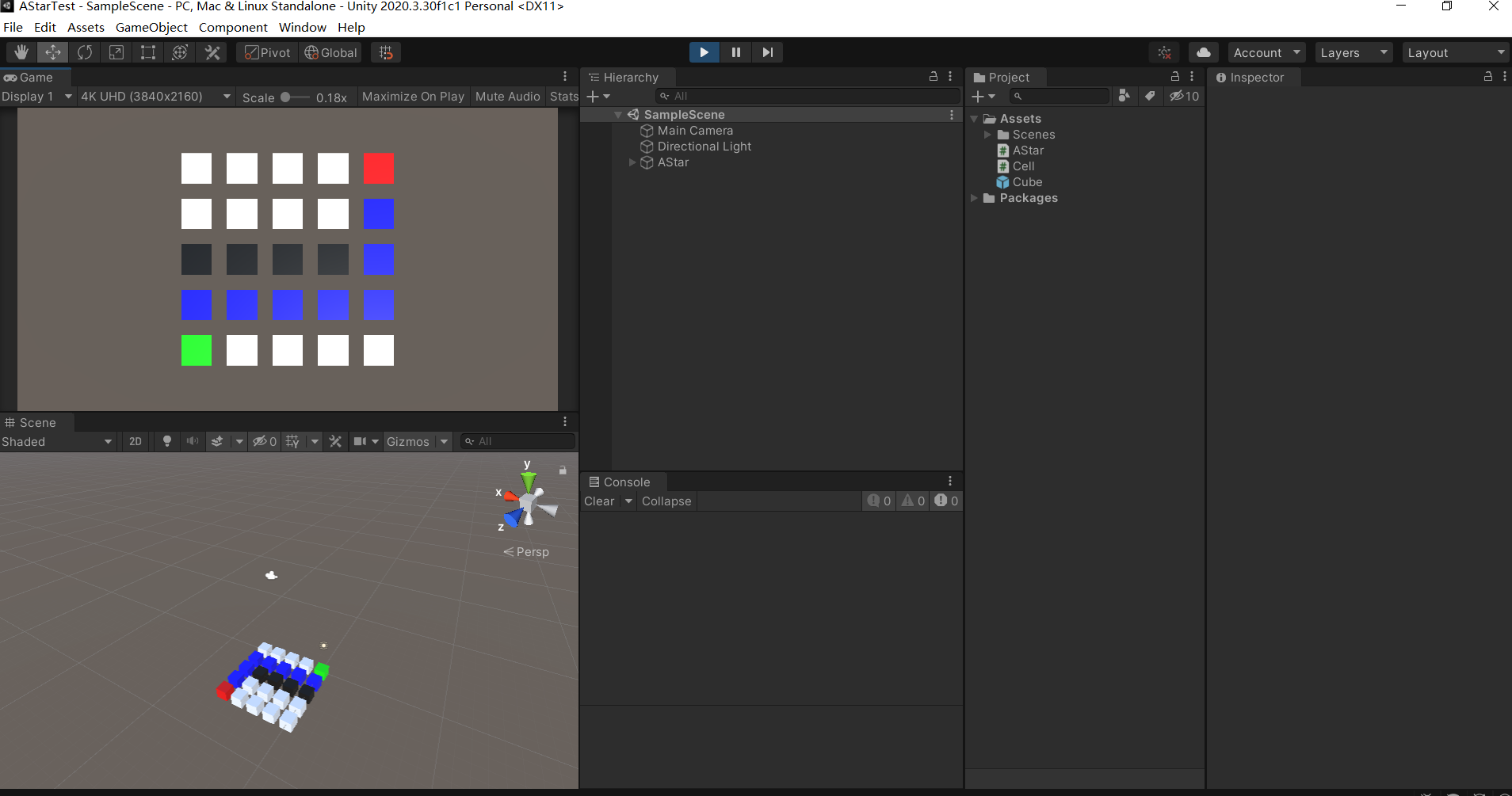
第三步,测试并查看正确性
这是八个方向的
这是四个方向的
总结:
以前同事做推箱子的时候,就用过A*算法,还教过我,不过我当时并没懂,最近又挨着学了一次,发现还是自己动手牢靠,记得比较清晰。当时的我的误区在于,我以为close列表就是路径,其实close列表仅仅代表“这个格子我已经检查过啦,不必再检查了”,真正的路径是通过结束点,一步步获取它的parent直到起始点(起始点的parent为空),这样才是完整路径。还需要注意的是,我们每次循环都会对open列表排序,选择综合代价最小的格子,作为本次循环的“CurrentCell”,所以我们必须为Cell对象实现排序接口,指定排序是通过对比F综合代价。

